Background
The Sikorsky Unmanned Air Vehicle Program started in July, 1986 with a small Defense Advanced Projects Research Agency (DARPA) contract, funded through National Aeronautics and Space Administration (NASA), to evaluate alternative configurations to conventional rotary-wing UAV’s. The study was completed in March, 1987 which concluded that a shrouded coaxial rotor produced a compact configuration which was safe to operate while maintaining the operational flexibility of a vertical take-off and landing system.
Sikorsky Aircraft continued development, using internal funds, by conducting small scale risk reduction tests which led to design and fabrication of a proof-of-concept vehicle. First flight was on July 13, 1988. The proof of concept vehicle was a low cost system which allowed evaluation of the air vehicle/rotor configuration plus manufacturing, fabrication approaches, logistics, and some operational aspects of an unmanned system.
Proof of Concept Cypher
The proof of concept (POC) cypherhad coaxial rotors inside a torus-shaped airframe. The torus shroud improved handling safety and helped increase lift. The proof-of-concept Cypherwas 5.75 feet (1.75 meters) in diameter and 1.8 feet (55 centimeters) tall, weighed 43 pounds (20 kilograms).It was first flown on July 13, 1988. This design was powered by a four-stroke, 3.8 hp (2.85 kW) engine with two 3-blade Schluter rotors 5 feet in diameter.
The POC air vehicle was built using components from available Radio Controlled (RC) model helicopters and flown by remote radio control. By radio link, the air vehicle received command signals from the operator which were electronically mixed and used to drive servos located below the rotor. The mixing unit also incorporated inputs from rate gyros located on the aircraft’s pitch roll and yaw axes. The rate gyros provided a degree of stabilization of the air vehicle.

The POC air vehicle had several limitations but was found to be fully controllable in all directions during hover. Due to performance limitations of the engine forward flight could only be obtained by mounting the air vehicle on a flatbed truck which was driven up and down the runway. In spite of the engine limitations a successful series of tests were conducted which showed the validity of the concept.
Cypher
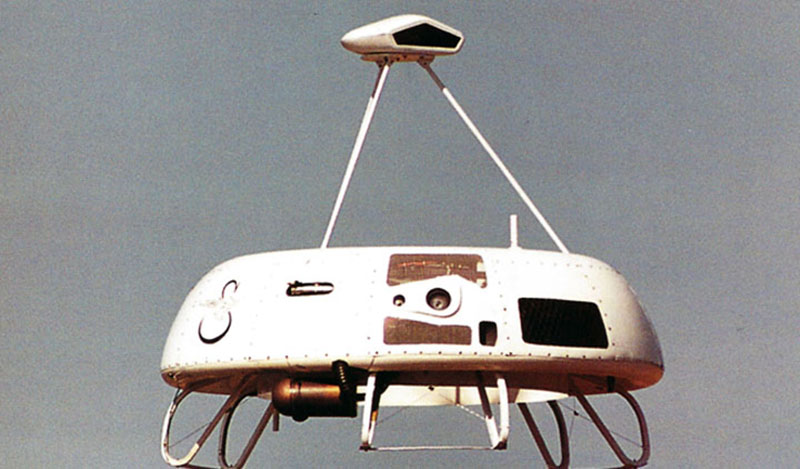
The proof of concept UAV led to a Cypher Technology Demonstrator (TD) aircraft that weighed 250 pounds, had a diameter of 6.5 feet and was powered by a compact, 52 hp rotary engine. The Cypher-TD first lifted off in a tethered mode in April 1992 and achieved initial free flight in early 1993. The Cypher-TD was used in flight tests and demonstrations through most of the 1990s, flying over 550 flights during that time and ultimately leading to a next-generation design, the Cypher II, which was a competitor in the United States Navy VT-UAV (Vertical Takeoff-Unmanned Aerial Vehicle) competition. The Sikorsky Cypher®’ Unmanned Aerial Vehicle (UA V) was originally developed as a aerial reconnaissance asset designed to provide the tactical commander real-rime targeting and tracking information in a high threat battlefield environment. As the Cypher system matured it evolved into a multi-purpose mission platform capable of performing a wide variety of missions such as remote sentry, underground structures detection, or payload delivery system. The Cypher could carry a sensor package on struts above its hull, or can transport loads weighing up to 50 lb (23 kg).

Cypher II – Dragon Warrior
Cypher II, also known as the “Dragon Warrior”, was selected by the US Marines to evaluate the utilization of a UAV to support over horizon targeting. Sikorsky was awarded a $5.46 million contract to deliver 2 prototypes and 4 ground stations, with a $3.76 million option to deliver 10 additional aircraft to production standard. The 2 prototypes were fabricated and ground tested before the program was cancelled due to cost and schedule overruns resulting from several technical issues associated with the adding the wing to the base Cypher configuration.
The Cypher family of UAVs employs a ducted fan consisting of two four-blade coaxial rotors to generate lift for hover mode. For Cypher II a conventional wing is attached to the annular fuselage to provide lift in forward flight, reducing the load on the lift fan. The wing, in conjunction with a second, smaller ducted fan at the tail of the aircraft was used for forward propulsion, greatly increased range and endurance for these variants. The Cypher II/Dragon Warrior was capable of carrying a 45 lb payload to a station 100 nm away and loitering for 2 hours. The all-composite aircraft has a maximum gross weight of 100kg and a top speed of 125 knots (230 km/h).

Mini Cypher
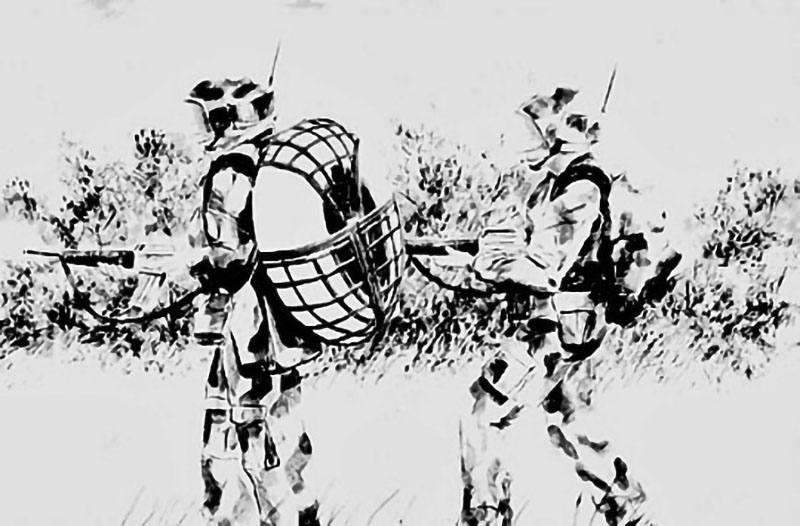
The Cypher aircraft can be scaled up or down to meet specific mission requirements. Sikorsky designed a Mini Cypher which was a man-portable version of the Cypher. The Mini Cypher could be carried on the back of a person and operated through a portable ground station or body worn computer with a helmet-mounted display. As with the larger Cypher UAV, Mini Cypher did not require a highly trained pilot; it is autonomous in all of its flight modes and only requires mission-oriented directives from the operator. The mini cypher was marketed to the Military and civilian Law Enforcement organizations. No requests for quotations were ever received.
The Mini Cypher was 36” in diameter, 8” in height, and weighed 30 lbs. empty. Its useful load was 20 lbs., which was divided between fuel and payload, for a takeoff weight of 50 lbs. It shared the shrouded coaxial rotor configuration of the Cypher UAV, ensuring relatively safe operation in close proximity to personnel buildings, trees, and other obstacles. Mini Cypher could land remotely on unprepared terrain and can take off and land in confined areas as small as 3 meters square. The projected characteristics of the Mini Cypher system are summarized in Table below:
Mini Cypher Characteristics
| Mini Cypher Characteristics | |
|---|---|
| Body Diameter | 3 ft |
| Height | 0.66 ft |
| Rotor Diameter | 2 ft |
| Nominal Weight | 30 lb. |
| Maximum Takeoff Weight | 50 lb. |
| Transportability | Car or Pickup Truck |
| Altitude (max) | 5000 ft |
| Speed (max) | 60 mph |
| Endurance (max) | 1-2 hours |
| Max Range | 3.1 miles (5 km) |
| Payloads | EO, FLIR, small radars, chemical detectors and magnetometers, radio relay, and non-lethal payloads. |
| Payload Weight (max) | 20 lbs. |
Cypher Development Timeline
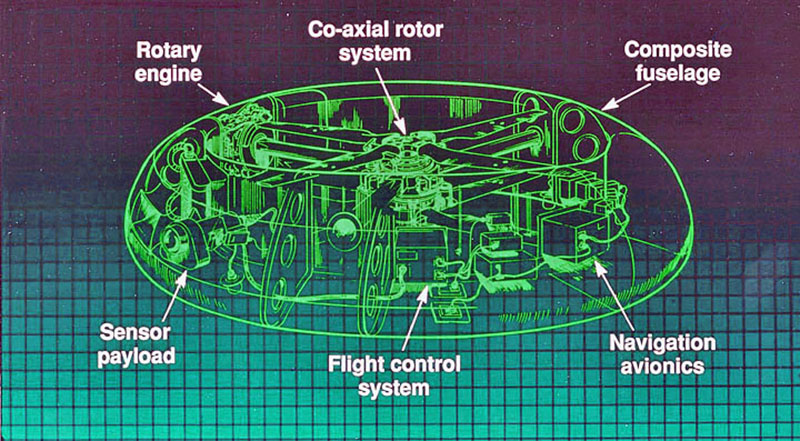
Configuration Features
Engine
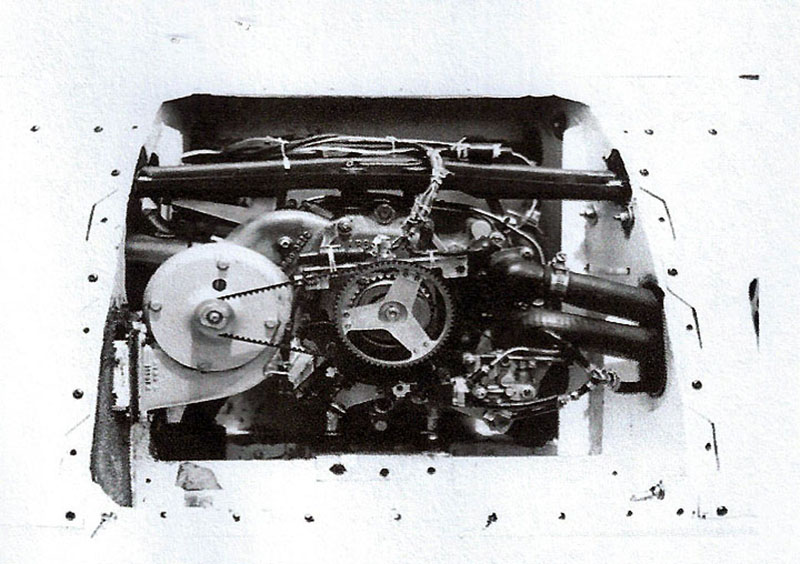
The Cypher aircraft is powered by a Wankel-type rotary engine, Model AR801, manufactured by UAV Engines LTD of England. The engine was selected for its high power-to-weight ratio and good partial-power fuel consumption. The AR801 is a single rotor, naturally aspirated, 294 cc combustion engine that incorporates both air and liquid cooling. The inner engine rotor is an air-cooled system that draws cooling air through the rotor housing. The air is pulled by a fan mounted on the outside engine casing. The engine housing is cooled by a water-glycol mixture that is circulated through a radiator mounted between the rotors on the inside of the shroud wall. The AR-801 produces 50 hp at 7,000 rpm. Engine operation is controlled and monitored by the aircraft flight control system.
The recommended fuel for the AR-801 engine is 100LL aviation gasoline, but automotive gasoline of RON 94 or higher was an acceptable alternative. UAV Engine LTD developed a larger displacement core engine that ex produced 60 hp in a heavy fuel configuration. This engine along with other heavy fuel engines were evaluated a alternatives for growth versions of Cypher.
Landing Gear
The Cypher landing gear was skids. The Cypher II design had a wheeled landing gear.
Control Station
A laptop computer was used to control Cypher flight. It was designed to be flown by non-pilots with minimal training. The Cypher was not flown by the controller but flew autonomously to complete the mission and return home. The purpose of the controller was to choose the mission and the fly to points. At anytime during the mission Cypher could be redirected or the mission aborted and the Cypher directed to return home.

Cypher System Manager
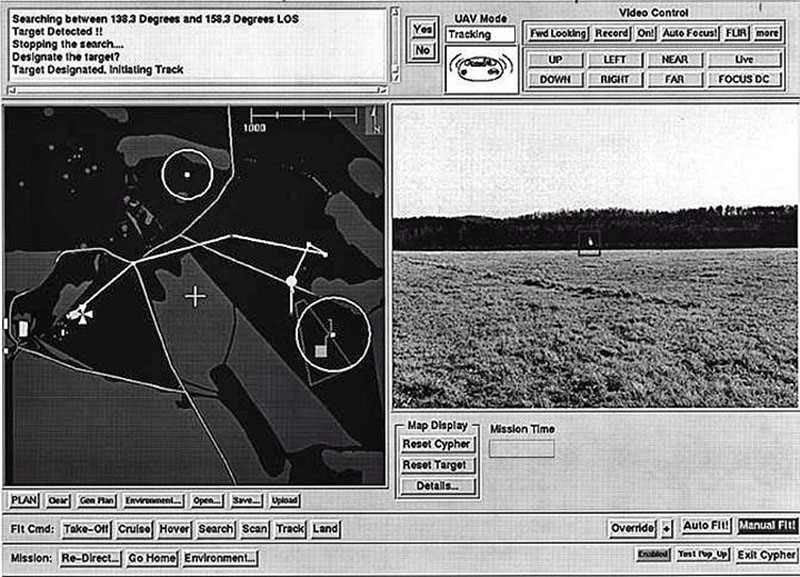
The Cypher aircraft’s advanced flight control system software and integrated avionics subsystems were refined so that mission execution was highly automated, requiring little or no operator intervention. The entire Cypher UAV mission could be planned, implemented and monitored from the System Manager display. The System Manager display is split into two portions. The left side displays a digital map of the area of interest, and the right displays the payload sensor output. To plan a mission the operator selects enroute/destination waypoints or areas to be searched using a mouse. Route planning software then plans a safe route to selected waypoints or search areas. The proposed route is displayed to the operator for acceptance. Soft buttons for control of aircraft functions, such as: auto takeoff, cruise, search, etc., are also displayed on the bottom portion of the System Manager screen. The soft buttons are controlled by the mouse. The right side of the System Manager display show real-rime data from the on board sensor. This data includes full video or FUR imagery. Data from the FUR can be transferred to an Automatic Target Recognition (A TR) system hosted on a Mac. The A TR detects targets and provides target location information back to the System Manager. Aircraft and target position along with track history are displayed on the digital map.
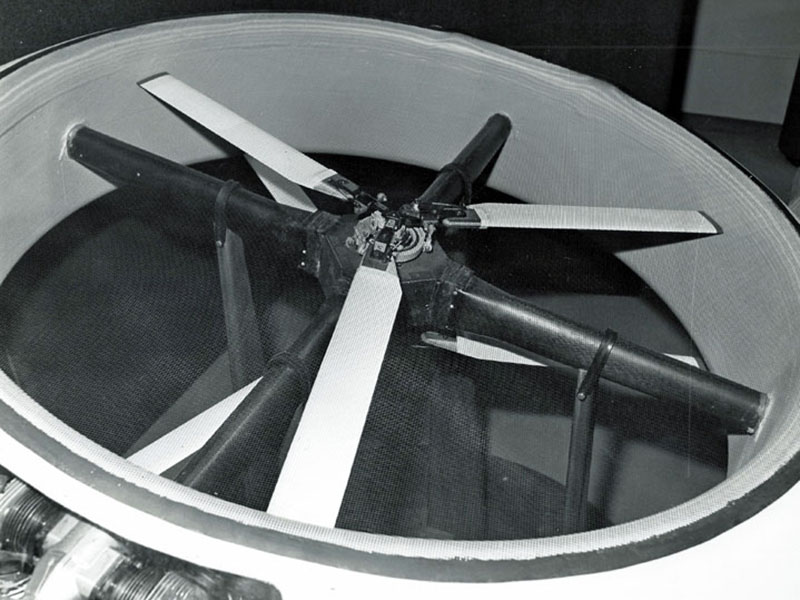
Fuselage and Coaxial Rotor
The Cypher airframe is an all-graphite structure shaped for aerodynamic efficiency in both hover and forward flight. The rotors, which are positioned in the center of the airframe, are a bearingless, all-composite design for enhanced reliability and maintainability at a reduced weight. By using a coaxial, counter-rotating rotor system, no anti-torque device is required and differential collective pitch control can be used for rotating the vehicle. The figure is a close-up view of the rotor system installed in the aircraft.
General Arrangement Drawing
Characteristics
| Cypher TD Characteristics | |
|---|---|
| Body Diameter | 6.5 ft (1.9 m.) |
| Weight | 264 lbs.(119.7 kg.) |
| Height | 2.0 ft. (.61 m.) |
| Rotor Diameter | 4.0 ft (1.22 m.) |
| Max Altitude | 8,000 ft (2438 m.) |
| Max Speed | 60 mph (96.6 kph) |
| Max Range | 90 miles (144.8 km.) |
| Max Endurance | 2 hours |
Mission Systems
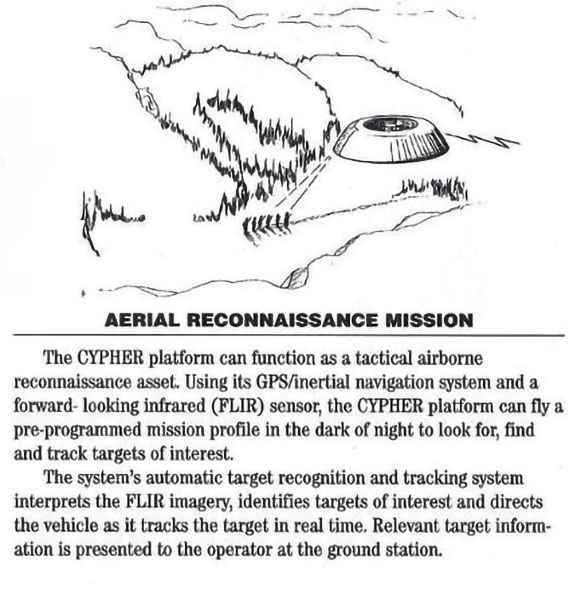
Aerial Reconnaissance
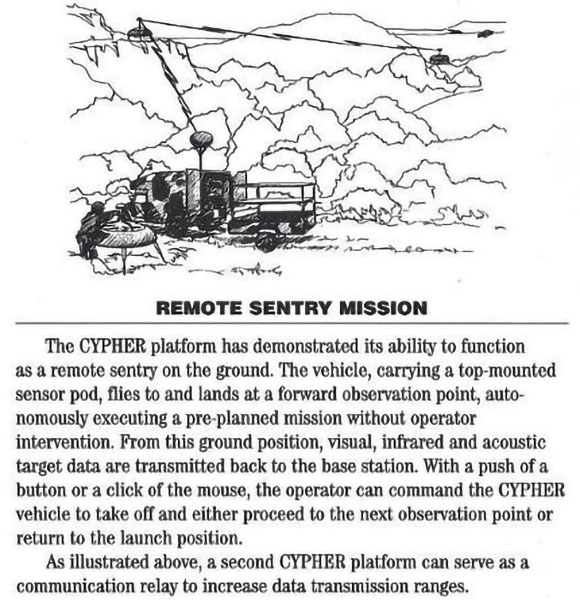
 Remote Sentry Mission
Remote Sentry Mission
Detection System
The Cypher was used to automatically search for unexploded ordnance at the Jefferson Proving Ground in Madison, Indiana. The evaluation effort was conducted as a collaborative effort between Sikorsky Aircraft Corporation and Battelle Pacific Northwest Laboratories. During the evaluation three cesium magnetometers were installed on booms suspended from the side and back of the Cypher air vehicle.
Sikorsky Aircraft was responsible for operating the Cypher vehicle while Battelle processed and analyzed the magnetometer data. The operator of the system manager selected an area to be searched by drawing a rectangle on the digital map. A search pattern was then automatically generated and uploaded to the aircraft through the digital uplink. As the aircraft autonomously flew the search pattern, the aircraft track history was saved and superimposed on the map. This allowed the operator to select the next search area without gaps or excessive overlap in coverage. Search plans were generated both before and during flight, giving the user the flexibility to use all available fuel on the aircraft before sending it back to the launch point for a landing. During testing the magnetometer data was displayed real-time in the ground station so that suspected targets could be re-examined.

Precise Payload Delivery
As part of a Military Operations in Urban Terrain (MOUT) experiment several payloads were carried to conceptually demonstrate the versatility of the Cypher platform. The payloads were mounted on a stub wing. A release hook mechanism allowed payloads to be dropped from the air or placed from the ground. The figure below shows a radio relay station being dropped from a 10’ hover onto the top of the building.

Summary
Sikorsky Aircraft’s Cypher UAV demonstrated its unique capabilities by flying a verity of mission scenarios from airborne recognizance to precision payload delivery. The autonomous capability of Cypher, auto takeoffs and landings, auto searching of areas of interest, waypoint flying and ability to return home with no operator intervention were unique features for an unmanned aircraft in the early 1990’s. The Cypher UAV eliminated the need for an operator to fly and navigation the aircraft, the operator only needed to direct the mission and the Cypher did the rest. The Achilles heel of Cypher was the noise from the two cycle high performance engine. Due to the power requirements and weight constraints, there was no easy way to muffle the noise. This and Sikorsky management’s desire to apply critical resources in other areas eventually lead to the shelving of the program.